2025年WAIC展會在上海盛大開幕,這場匯聚全球頂尖科技力量的盛會,成為展示人工智能與機器人領域前沿成果的重要舞臺。他山科技攜多款新品精彩亮相,包含TS-F 指尖觸覺傳感器、TS-E 機械手觸覺傳感器、TS-V 視觸融合訓練平臺 、TS-VT視觸融合訓練平臺(數據采集)、觸覺模擬仿真、TS-R觸覺感知服務機器人等,憑借一系列核心技術與落地成果,吸引了眾多行業專家、合作伙伴和觀眾的目光,充分展現了其在機器人觸覺感知技術領域的創新實力。
他山科技展臺
高精度觸覺傳感器:解鎖感知與交互新維度
他山科技展出的 TS-F 指尖觸覺傳感器與 TS-E 機械手觸覺傳感器,以超高靈敏度與多功能集成,將機器人的感知與交互能力推向新高度,成為智能機器人 “指尖上的神經中樞”。
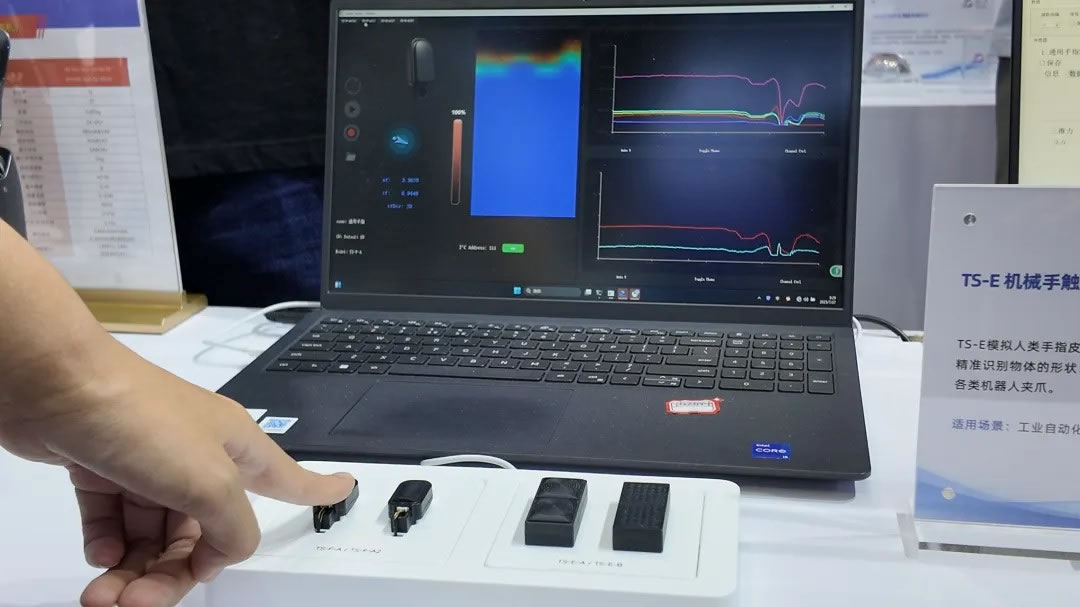
TS-F 指尖觸覺傳感器與 TS-E 機械手觸覺傳感器及其應用
TS-F 指尖觸覺傳感器堪稱微型感知利器,集成接近覺、三維力檢測、紋理感知等多重功能。其核心突破在于 “未接觸先感知”—— 能提前預測物體的存在與距離,使機器人提前優化操作路徑,大幅提升交互安全性與靈巧性。0.01N 的感知靈敏度,讓它能精準捕捉法向力、切向力的細微變化,配合點陣形態設計,可輸出精準的力分布數據。目前,這款傳感器已被因時、強腦、靈巧智能、靈心巧手等海內外絕大多數人形機器人及靈巧手廠商采用,既可集成標準化模組,也能適配不同結構,成為機器人觸覺感知方案的優選核心部件。
TS-E 機械手觸覺傳感器則模擬人類手指皮膚特性,實現了非接觸(接近覺)與接觸檢測的無縫融合。它能精準識別物體的形狀、位置和摩擦力,支持一維與三維力測量,廣泛適配各類機器人夾爪。在工業自動化的精細分揀中,它能精準區分相似零件;在服務機器人交互中,它能通過摩擦力感知避免物體滑落,其 “觸覺識別、高精度操作” 特性,讓機器人在工業、服務、科研等場景中實現更類人的細膩操作。
兩款傳感器共同構建了機器人的 “觸覺神經系統”,其高靈敏度、多維度感知能力,不僅解決了傳統機器人 “抓取易損、操作僵硬” 的痛點,更讓機器人在精密制造、智能服務等領域的應用成為可能,推動機器人從 “機械執行” 向 “智能交互” 升級。
視觸融合訓練平臺:多模態技術驅動泛化抓取革命
他山科技展出的視觸融合訓練平臺,包括 TS-V 視觸融合訓練平臺與 TS-VT 視觸融合訓練平臺(數據采集),以多模態融合技術實現了機器人抓取能力的跨越式突破,重新定義了復雜場景下的機器人操作標準。
TS-V視觸融合訓練平臺
TS-V 視觸融合訓練平臺集成視覺觸覺多模態傳感技術,實現了機器人在復雜場景下穩定抓取任意物體的行業難題。其核心優勢在于無需提前訓練即可感知新物體,具備極強的泛化能力 —— 高靈敏度觸覺傳感器能實時感知接觸狀態與
施力狀況,根據物體特性自適應調整夾爪動作,從柔軟的果蔬到堅硬的器械,均能實現穩健、柔順的抓取。同時,平臺實時監測三維力的大小與方向,確保被抓取物體精準放置,操作安全性與穩定性遠超傳統方案。
TS-VT 視觸融合訓練平臺(數據采集)則為行業提供了專業的多維觸覺數據解決方案。它支持多款靈巧手及夾爪等末端執行器,可輕松采集法向力、切向力、接近覺、位置信息等數據,并提供高效的多模態數據的紀錄、標注與導出功能。這一平臺大幅降低了數據采集成本,為具身模型算法訓練、機器人交互性能評估奠定了可靠的數據基礎,推動觸覺感知技術加速迭代。
TS-VT 視觸融合訓練平臺(數據采集)
兩大平臺廣泛應用于機器人操作系統開發、具身模型算法訓練、機器人感知與展示等場景,其 “多模態融合、泛化抓取、自適應力調節、多維數據采集” 等核心特性,正引領機器人觸覺感知技術從 “專項訓練” 向 “通用泛化” 邁進。
在現場互動展示中,搭載他山科技人工智能觸覺傳感器的兩指夾爪直觀呈現了技術實力:視覺系統先對物體輪廓、高度建模并規劃抓取點,隨后機械臂依據觸覺感知動態調整—— 抓取時根據物體軟硬、重量實時適配力道,移動中依托自研邊緣端算法實現實時感知,放置時通過切向力感知輕柔放下,全程無需中樞系統冗余通訊,操作流暢度與安全性堪比人類指尖動作,彌補了純視覺方案無法自適應調節等痛點。
觸覺模擬仿真平臺:打通虛擬與現實的閉環
他山科技的觸覺模擬仿真平臺,以 “真實還原、虛實互通” 的核心能力,構建了從虛擬訓練到現實應用的完整閉環,為機器人觸覺技術的快速迭代提供了 “數字孿生” 引擎。
觸覺模擬仿真
傳統人形機器人具身算法模型訓練依賴大量真實物體數據,成本高昂且難以泛化;而現有仿真平臺缺乏精準觸覺數據,導致虛擬與現實差距(Sim2Real gap)巨大。他山科技基于量產傳感器 TS-F-A,在 MuJoCo 平臺構建了國內首個基于真實產品的觸覺模擬仿真模型,實現了觸覺接觸仿真、數據曲線實時可視化、觸覺模態建模訓練的全流程覆蓋。
平臺能輸出與真實傳感器完全同維度的觸覺數據 —— 包括接近覺、法向力、切向力等數據,通過真實產品校準,將 Sim2Real 差距縮小至業界領先水平。用戶可將其集成進具身智能體、靈巧手或末端執行器模型,在虛擬環境中完成大量算法訓練,再通過實際 - 虛擬雙向算法遷移,快速應用于現實場景,大大降低了數據采集成本。
現場演示中,靈巧手真機與仿真模型實現實時通訊:真機指尖觸覺傳感器和仿真模型搭載于靈巧手上同步執行相同動作,屏幕上實時展示觸覺數據實際值和仿真值的對比,顯示出其一致性。這種 “虛實鏡像” 能力,不僅為機器人研發、觸覺算法訓練、教育教學提供了高效工具,更降低了觸覺技術的應用門檻,推動行業從 “實物試錯” 向 “虛擬優化” 轉型。
覺感知服務機器人:觸覺感知技術落地場景標桿
TS-R 觸覺感知服務機器人的亮相,成為他山科技技術落地能力的最佳證明 —— 這款融合他山觸覺感知技術與云跡科技移動平臺的機器人,以類人化的精細操作,在服務場景中展現出 “有溫度的智能”。
TS-R觸覺感知服務機器人
其核心突破在于 “力控精度”:通過精準感知與調節遞物力道,完美實現遞水、遞話筒等細膩動作。在抓取階段,觸覺傳感器識別物品是否拿取、是否滑動,確保抓取穩定;遞送過程中,實時自適應力調節,避免物品掉落或損傷;交接時,根據人體接觸反饋輕柔松手,操作體驗堪比人類服務。
未來,該機器人將在酒店洗衣房、會務接待、展廳導覽、高端服務等場景落地應用,承擔遞送酒店用品、外賣、快遞等輕量任務。其 “專用靈巧手 + 可控泛化能力” 的設計,針對服務場景 “任務邊界清晰、需求明確” 的特點,實現了低成本、高可靠的商業化落地,為服務機器人行業提供了 “觸覺賦能” 的范本。
從核心傳感器到系統解決方案,從虛擬仿真到實體應用,他山科技在 WAIC 展會上展現的不僅是一系列新品,更是一套完整的智能觸覺技術體系。其以 “多模態融合” 突破機器人感知瓶頸,以 “仿真平臺” 加速技術迭代,以 “落地案例” 驗證商業價值,全方位展現了在機器人觸覺技術領域的發展成果。
這些新品的應用,正讓機器人從 “看得見” 向 “摸得著、懂力度、會適應” 進化,在工業制造、服務交互、科研探索等領域開辟新可能。未來,隨著他山科技持續深耕,這些創新成果有望進一步推動機器人產業的發展,為人工智能與機器人的融合應用注入新動力。
他山科技
2025年8月5日
分享到: